


Hallo in die Runde,
ich möchte euch heute mein letztes Bastelprojekt vorstellen, die Weiterentwicklung meiner Eigenbaufernsteuerung auf Arduinobasis, den Senduino 2.0.
An sich war ich mit meiner alten Steuerung schon sehr zufrieden, aber es gab ein paar Punkte die mich auf Dauer gestört haben:
- 4D-Joysticks ausgeleiert und Probleme mit brechenden Federn
- Kabelsalat und Breadboards im Inneren (jeder Elektriker würde sich im Grab umdrehen)
- Wackelkontakt im Hauptschalter
- wenig ergonomisch bei Auflage auf dem Schoß
- Positionierung der Hilfsjoysticks
Einfach gesagt war es nach über 400 Betriebsstunden an der Zeit den ersten Prototypen weiterzuentwickeln.
Das Endergebnis sieht mittlerweile so aus:


Der Vergleich zu den traurigen Überresten des Vorgängers:

Aber eins nach dem anderen, im Folgenden will ich versuchen meine Erfahrungen und Überlegungen, sowie Aufbau und Funktion etwas genauer zu beschreiben.
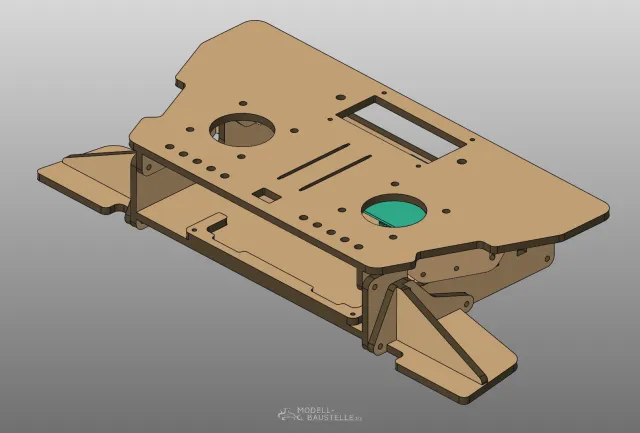
Bauphase:
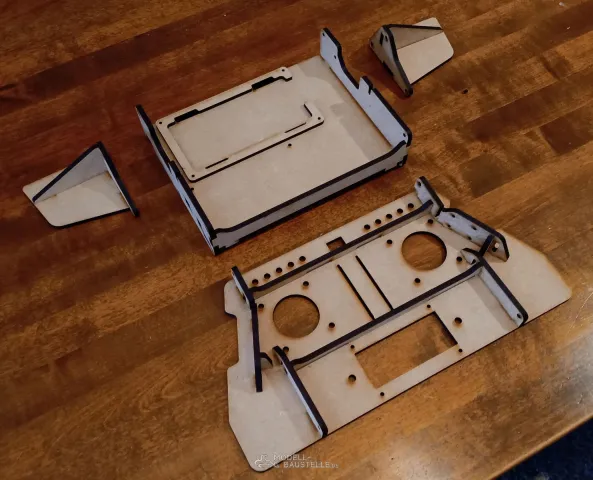
Los ging es natürlich wieder im CAD, das alte Modell wurde überholt und verfeinert. Anschließend wurden die MDF-Laserzuschnitte bestellt und zusammengeklebt. Hier hatte ich bereits beim ersten Prototypen sehr gute Erfahrungen gemacht. Leider hat mein erster Anbieter das Rohmaterial aktuell nicht im Angebot. Der Ersatz ist etwas teurer, dafür aber weniger passgenau. Schade, aber es funktioniert trotzdem ganz gut.

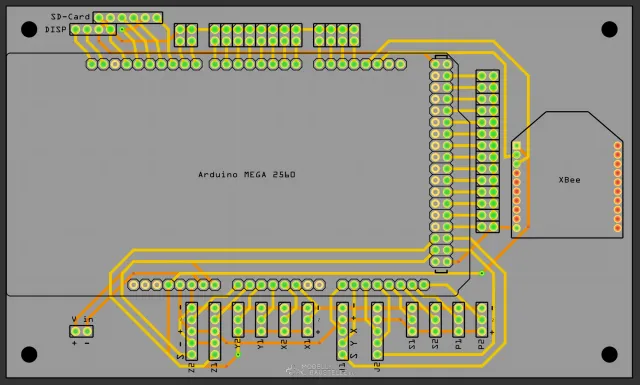
Nach dem Gehäuse konnte es mit dem Innenleben und der Elektronik weitergehen. Wie schon aufgelistet war die Verkabelung des alten Senders eine kleine Katastrophe. Um flexibel zu bleiben hatte ich ein Breadboard eingesetzt und so die einzelnen Elemente mit den richtigen Anschlüssen am Adruino verbunden. Das war weder schön noch aus elektrischer Sicht besonders sinnvoll. Im Nachinein hatte ich nie den Bedarf die Verkabelung großartig umzustecken, die Flexibilität war überflüssig. Also wurde es Zeit eine Platine zu erstellen. Diese wurde mit Fritzing designt und auch direkt aus diesem Programm raus bestellt. Für solche Fälle ist dieses sehr zu empfehlen, zumal gängige Bausteine wie Arduino und co. bereits vorkonfiguriert sind.
Mein Konzept sieht vor jedes Bedienelement individuell ein- oder ausstecken zu können. Das bedeutet jedem Signaleingang auf der Platine sind passend Plus- und/oder Minuspol zugeordnet, wie man das halt so macht.
Es ist schön zu erkennen, wo der Arduino Mega (das Herzstück) und das XBee-Sendemodul platziert werden. An der Hardware hat sich im Vergleich zum Prototypen nichts verändert.
Der Screenshot zeigt das fertige Layout im Programm. Vielleicht nicht die schönste Arbeit, dafür aber sehr praktisch.
Unten sieht man die fertig bestückte Platine sowie die neuen Joysticks:
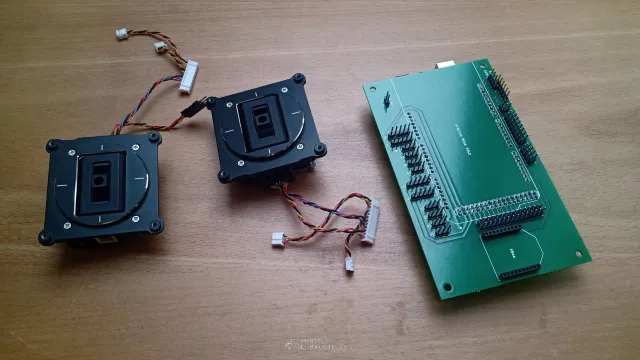
Die Joysticks stammen von FrSky. Ich habe diese gewählt, da sie relativ preiswert sind und dennoch über Hall-Sensoren statt der üblichen Potis verfügen. Das bedeutet, dass sie theoretisch verschleißfrei sein und dauerhaft saubere Werte liefern sollten. Bei den alten 4D-Joysticks aus Fernost war mit der Zeit ein zunehmendes Rauschen festzustellen. Wie eingangs erwähnt waren aber auch die Zentrierfedern nicht von der besten Qualität. Diese brachen deutlich zu oft und ich hatte keinen Nerv mehr mich um Ersatz und Reparatur zu kümmern.
Dennoch wollte ich die 4D-Funktion erhalten. Da die FrSky Joysticks nur über stinknormale Knüppel verfügten musste gebastelt werden. Idealerweise haben die Schäfte der 4D-Joysticks den selben Durchmesser wie die Fr-Sky-Aufnahmen. Daher habe ich erstere einfach abgedreht und in die neue Fassung gezwängt. Etwas Klebstoff hilft gegen ungewollte Verdrehung, um genügend Widerstand in der Z-Achse zu haben. Auch die Funktion des Tasters blieb erhalten.
Leider stellte sich heraus, dass die Zentrierfedern etwas zu schwach für die dritte Achse sind. Klar, soetwas war auch nie vorgesehen. Es funktioniert zwar, allerdings ist der Widerstand beim Steuern doch sehr gering, weshalb die Haptik etwas leidet. Dazu fangen die Joysticks zu schnell an zu pendeln, wenn man ungünstig degegen stößt.
Besonders deutlich wird dieser Umstand, wenn man die Steuerung aufstellt. Die Joysticks hängen sichtbar nach unten. Ich muss mich also noch um stärkere Federn kümmern.
Äußerer Aufbau

Die grundsätzliche Form hat sich zum Vorgänger wenig geändert. Die Steuerung ist insgesamt ein bisschen gewachsen um mehr Platz im Inneren zu schaffen. Die generelle Anordnung der Elemente blieb aber erhalten. Tatsächlich habe ich nur mehr Schalter vorgesehen sowie die Positionierung der Haupt- und Nebenjoysticks zueinander optimiert.
Die kleinen Playstationjoysticks waren beim Prototypen nicht von Anfang an vorgesehen, was einen gewissen Kompromiss bei der Platzwahl zur Folge hatte. Dieses Mal habe ich von vorne herein auf eine bequeme Erreichbarkeit geachtet. Sinn des ganzen ist, die Nebenjoysticks mit den kleinen Fingern bedienen zu können, sodass man die Hauptjoysticks nicht loslassen muss. Mit etwas Übung lassen sich so recht komplexe Fahrmanöver, gerade mit Baggern vollführen.
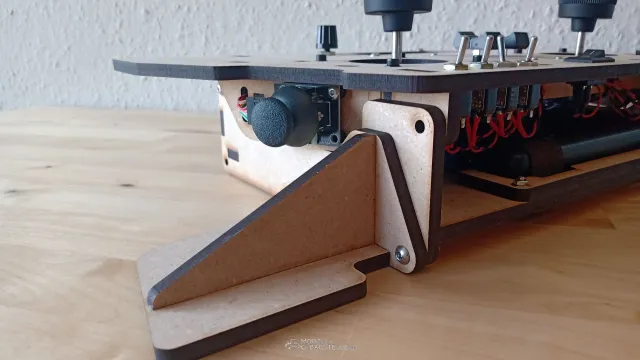
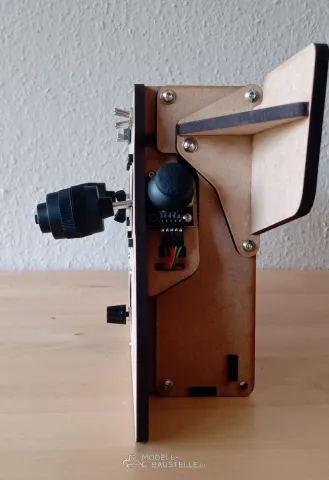
Was wohl direkt auffällt sind diese komischen Flügelchen welche plötzlich seitlich angewachsen sind. Diese haben aber keinen aeronautischen Hintergrund sondern dienen ganz simpel aus Auflage. Da ich meistens im Sitzen fahre und dabei nicht nur mit den Daumen sondern mit mehreren Fingern steuere liegt der Sender auf meinen Obeschenkeln auf. Die alte schmale Kastenform zwang mich die Beine recht eng zusammenzuhalten. Das sieht weder gut aus, nocht ist es auf Dauer besonders bequem. Die Auflagen ermöglichen mir nun ganz locker zu sitzen, ohne dass mir der Sender durch die Beine fällt.
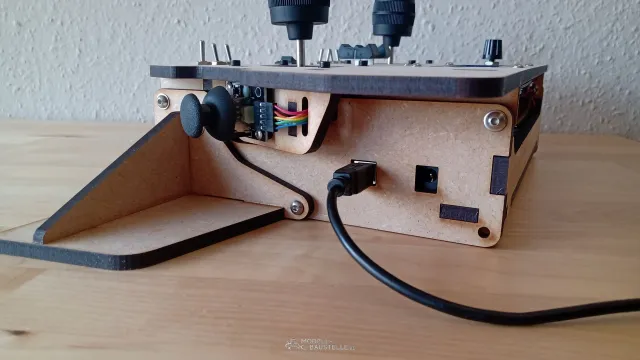
Als letzte signifikante Verbesserung ist die Zugänglichkeit der Anschlüsse des Arduinos zu nennen. Es gibt nun passende Ausschnitte in der Seitenwand des Senders. Damit lässt sich das Verbindungskabel zum PC oder auch eine externe Stromversorgung ganz einfach anstecken, ohne den Sender öffnen zu müssen. Selbst die Powerbank ist so positioniert, dass sie sich im eingebauten Zustand laden lässt.
Innenleben

Hier zu sehen das Innenleben des Senders. Die Platine hat den Kabelsalat deutlich vereinfacht. Dennoch bin ich kein guter Strippenzieher, aber es funktioniert wie es soll und sieht durch die neuen Kabelführungen am Oberteil halbwegs geordnet aus.
Der Ardunio befindet sich unterhalb der Platine und ist daher nicht sichtbar. Obenauf ist das XBee-Sendemodul eingesetzt. Mehr braucht es an sich für den Betrieb nicht, abgesehen natürlich von einer Stromquelle. Da der Arduino grundsätzlich mit 5V arbeitet und das sogar per USB-Verbindung, kommt jede handelsübliche Powerbank in Frage. Diese sind günstig, pflegeleicht und teilweise sehr ausdauernd. Meine hat eine Kapazität von 20.000 mAh und erreicht damit eine Betriebsdauer von ca. 40 Stunden.
Bei den XBee-Sendemodulen handelt es sich um einen weit verbreiteten Funkstandard. Die Verbindung ist sehr stabil, sofort vorhanden und nur schwer zu stören. Bisher bin ich absolut zufrieden damit. Kompliziert wirds nur, wenn man zwischen mehreren Modellen umschalten möchte. Allerdings ist das in meinem Fall nicht mehr nötig.

