

Schade man sieht nicht viel. Trotzdem Danke.
Beiträge von Andre_P
-
-
Hallo,
ich suche Bilder vom inneren der Kabine des Liebherr 984.
Na wer hat welche?Dank im Vorraus, Gruß Andre.
-
Durch die beiden Alu- Rohre wird das Gewicht dann im Bagger verschraubt. Da der Transport
bisher schon eine kleine Herausforderung ist, wird das Gewicht dafür rausgenommen.
(Gewicht: 5 kg)


Grüße Andre
-
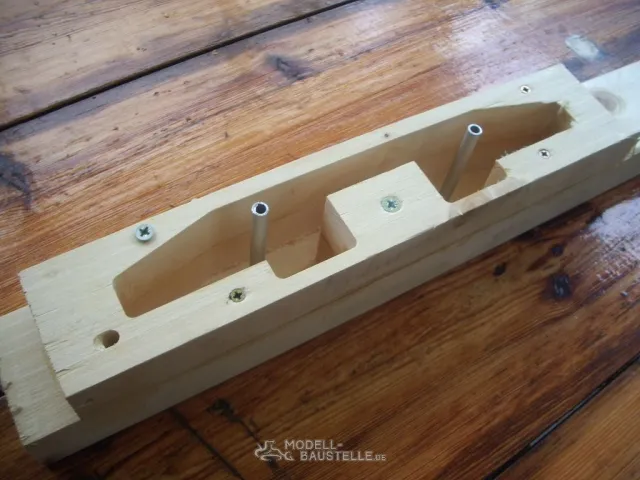
Gestern hab ich das Kontergewicht gegossen. Dazu habe ich eine zweiteilige
Holzform gefräst. Beide Hälften dann miteinander verschraubt und mit UHU Endfest
verklebt. Das 99% Blei im Topf auf Holzkohle geschmolzen und in die Form gegossen.
Dafür das es mein erster Guss war, bin ich mit dem Ergebnis doch recht zufrieden.



-
Hallo Kalle,
geiles Teil, sauber und scheinbar robust gearbeitet. Mir gefallen die größeren Maschinen sowieso besser als die 1:14,5er .
Ich bin gespannt wie es weiter geht.Gruß Andre
-
Sauberkeit muss sein!



Gruß Andre
-
Hallo,
hier ein paar Bilder der Baustelle vom letzten Wochenende.





-
Auf der Oberseite der Stoßstange ist eine Nut zur Aufnahme des 1,5mm dicken Alu- Blechs eingefräst.
Eine der Alu- Platten hat eine eingefräste Tasche. Die Stoßstange wird einfach auf die 2mm dicke Stahlgrundplatte des
Oberwagens geschoben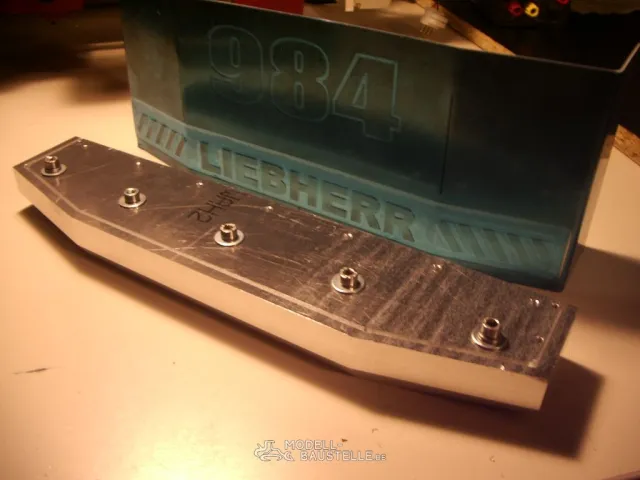



und noch ein Bild vom Gravieren/ Fräsen mit meinem PROXXON Handgerät an der BF20L.
Fräser: VHM Einschneider unbeschichtet d=1mm
Drehzahl: 20.000upm
Zustellung in Z max: 0,25mm
Vorschub: 800mm/min
Fräszeit: 2h
Viele Grüße
Andre -
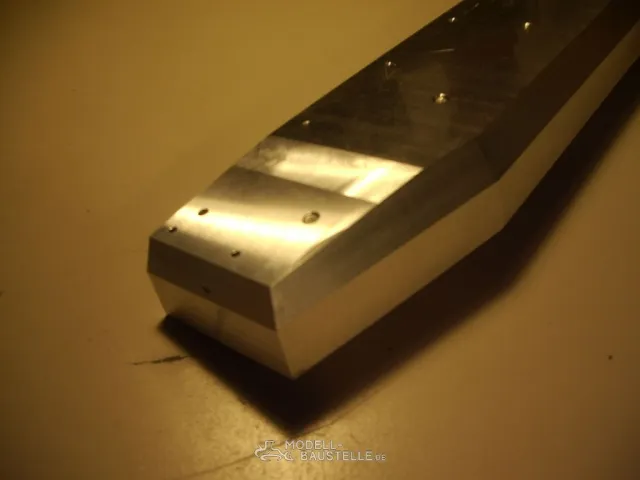
weiter gehts mit der hinteren Stoßstange. Diese besteht aus 3 einzelnen miteinander
verschraubten 10mm dicken Alu- Platten. Das zweite Bild zeigt das Fräsen der Schrägen
im "3- Achsenschraubstock für Arme." Um die Schrägen an die schrägen Seitenflächen
zu bekommen muss das Teil in allen 3 Dimensionen mit der Messuhr eingerichtet werden.
Weder die beiden Schraubstöcke, noch das Bauleil sind parallel/ rechtwinklig zu einer
Maschinenachse.


-
Hallo,
hier nun die neuesten Fortschritte.
Die Abdeckungen/ Aufnahmen für die Ausleger- Zylinder im noch unlackierten Zustand:




Die Aufnahmeteller werden mit dem Ausleger verschraubt. Durch die Löcher werden beide Zylinder
mit einer Gewindestange miteinander verschraubt. Zum Schluß kommt die fingerhutförmige
Abdeckkappe drauf. -
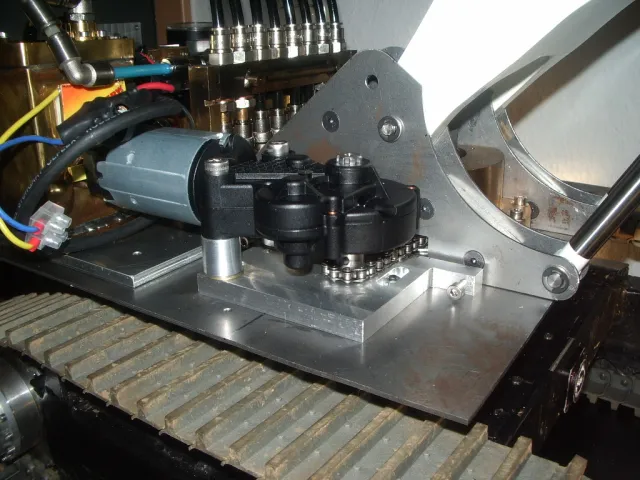
Da der Getriebemotor für den Drehantrieb unter ständigem Zahnausfall litt,
gab es hier noch Bedarf einer Nachbesserung.
Dank an Thomas hier aus dem Forum, der mir die Firma "Ott-Antriebe" empfohlen
hat. Nach einem längeren Telefonat wurde mir der passende Motor
prompt zugeschickt. Dieser wird hautsächlich zum motorischen Ausrichten von
Sat Schüsseln verwendet. Bärenstark, hält ein großes Drehmoment aus und ist
nahezu spielfrei und leise, und das zu einem guten Preis. Ich kann die Jungs nur weiter empfehlen!Ich wollte eigentlich kein Schneckengetriebe, weil der Platz nur mit "größeren" Umbauten geschaffen
werden konnte, aber das Preis- Leistungsverhältnis hat überzeugt.Also noch schnell einen Halter gebaut. In diesem ist ein Kugellager als Gegenlager verbaut, um die radialen
Kräfte die durch das Spannen der Kette entstehen abzufangen. Die Kette wird über zwei M4 Schrauben gespannt,
und die Grundplatte dann mit dem Oberwagen verschraubt.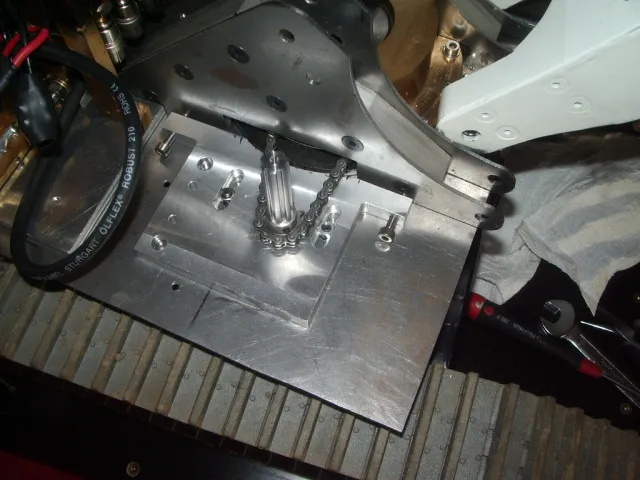


Beim ersten Testlauf hatte sich auch gezeigt, das an den Deckeln der Hydraulikzylinder eine geringe Menge Öl
tropfenweise austritt. Wahrscheinlich über die Stangendichtung. Um das zu verhindern, habe ich alle Zylinder
nochmals geöffnet und in die Deckel noch eine statische Dichtung integriert.
Grüße Andre
-
So, den ersten Härtetest im nassen Beet haben wir zwei hinter uns.
Hat soweit alles gehalten und ist auch dicht gewesen. Hydraulikdruck
eingestellt auf 35 bar.Sorry das Video hat leider nur schlechte Qualität. Neue Kamera oder
Bagger, beides geht nicht.http://www.youtube.com/watch?v=i8DxE01u2EU
Gruß
Andre -
Hallo,
ich bin auf der Suche nach einem Getriebemotor für meinen Drehantrieb, dessen Getriebe
auch bei blockiertem Antrieb nicht kaputt geht.Liebherr 984 in1:12 -->
[1:12] ca. Liebherr 984)-Drehmoment: mindestens 8Nm
-Drehzahl: mindestens 20upm
-Spannung: 12V
-möglichst geringes Getriebespiel
-Scheibenwischer Motor mit Schnecke fällt aus, da der Platz nicht vorhanden istDas MFA Teil vom C. 222375 [Motor 385 / Übersetzung 810:1 / Drehzahl 20upm / Drehmoment 32,8Nm] passt soweit,
leidet bei blockiertem Antrieb aber unter Zahnausfall in der letzten Getriebestufe. Bei dem 50:1 übersetztem Modelcraft
Getriebemotor (233132) passiert das zwar nicht, aber die Selbsthemmung reicht hier nicht mehr aus. Der Ausleger hält bei voller
Schaufel und gestrecktem Ausleger nicht seine Position. Ausserdem fehlt ein wenig Kraft.Wenn man sich mal bei Faulhaber Planetengetrieben umsieht ist da schon was passendes zu finden (preislich aber nicht).
zum Beispiel:Planetengetriebe 32/3-246:1 --> 208€
Glockenankermotor 32 Ø x 42 mm / 27 Watt / 5200upm/ Blockiermoment 181mNm --> 165€Ergibt ein maximales Drehmoment (bei 60% Wirkungsgrad) von 27Nm und eine Drehzahl von 21upm . Allerdings
ist im Datenblatt von einem max. Drehmoment von 10Nm die Rede. Bedeutet das jetzt, das der Antrieb mehr Leistung
hat, wie das Getriebe überhaupt abgeben kann? Gibts da wieder Zahnausfall?Gibt andere preiswertere Alternativen, andere Motoren, den Einbau einer geringen Übersetzung und zusätzlicher Bremse,
oder eine Strombegrenzung für den hoch übersetzten Motor?Bin für jede Hilfe Dankbar!
Gruß Andre
-
Hallo, wieder was fertig.
Die Zylinder sind lackiert, eingebaut und angeschlossen. Auch der Stiel hat
seinen Anstrich erhalten.


Auf die Schaufel habe ich, wie von euch vorgeschlagen eine zusätzliche Verstärkung aus Messingstreifen 8x2 mm gelötet. Da normale
Farbe wohl nicht lange halten wird, und dann das Messing zu sehen ist, habe ich die Schaufel brüniert. Auf dem Foto siehts irgendwie
Scheisse aus, aber im Original macht das keinen schlechten. Problematisch ist eben das ich die Schaufel nur "Streichen" und nicht tauchen konnte.
Mal schauen wie lange das hält.
-
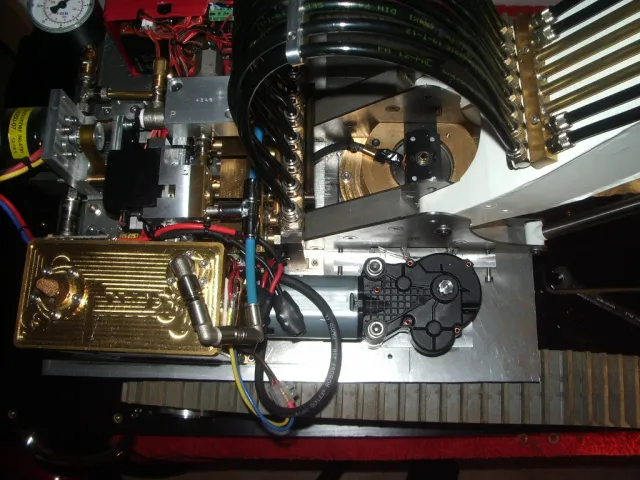
Die gesamte Elektronik ist nun fest eingebaut und verdrahtet. Die Regler für Pumpe und Drehantrieb sitzen
nahe bei den Motoren und weit weg vom Empfänger um Störungen zu vermeiden. Der Empfänger, der
ober beschriebene "Hydraulikmischer" und der Empfänger Akku sitzen in der roten Kunststoffbox.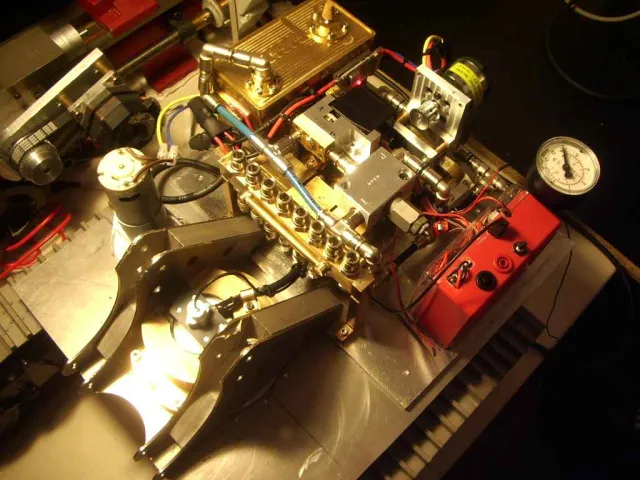
ein Video der Hydraulikfunktionen im Trockenlauf in übelster Qualität ist hier zu finden:
http://www.youtube.com/watch?v=G3BYzhgjjdkUm auch mal die Hydraulik und den Kettenantrieb gleichzeitig zu bedienen habe ich auf die Kreuzknüppel
meiner Fernsteuerung zwei Potis mit rastender Mittelstellung gesetzt. Lässt sich eigentlich sehr gut handhaben.
Gruß Andre
-
Heute gibt es mal wieder was zu zeigen.
Ich hatte ja bisher jeweils im Unter- und Oberwagen je einen Empfänger eingebaut, die parallel auf den gleichen Frequenz gearbeitet haben.
Da ich ab und zu mit Empfangstörungenzu kämpfen hatte, habe ich mich entschlossen eine Übertragung des Summensignals des Empfängers im Oberwagen zum Unterwagen mittels Lichtwellenleiter einzubauen.Dabei stehen sich zwei Glasfaserkabelenden drehbar gegenüber.Funktioniert ähnlich wie die Infrarotübertragung von der Zugmaschine zum Sattelauflieger über den Königsbolzen, mit dem Vorteil, das sich keine elektrischen Störungen in die Zuleitung zur Drehdurchführung einkoppeln können.
Da die Stromversorgung des LWL Empfängers sehr stabil sein muss (hab länger dran rumgebastelt) habe ich gleich eine richtige Platine für die
Kettenregler mit den notwendigen Entstörmaßnahmen gefräst.
Da der Bagger eigentlich wenig fährt habe ich mich wieder für Relais zur Umpolung der Motorspannungen entschieden. Eine H-Brücke zu bauen ist hier einfach übertrieben.


-
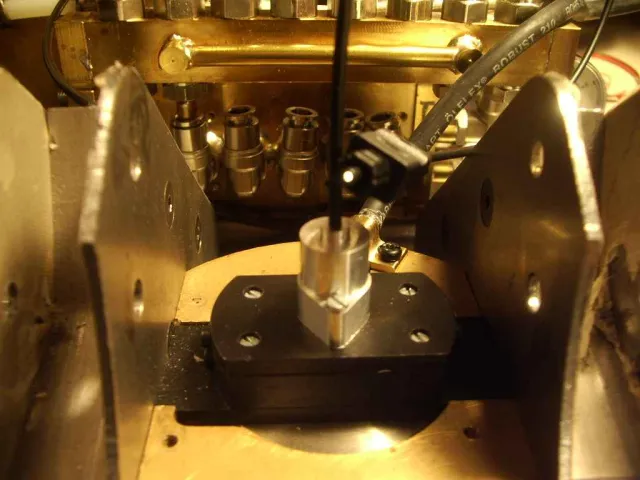
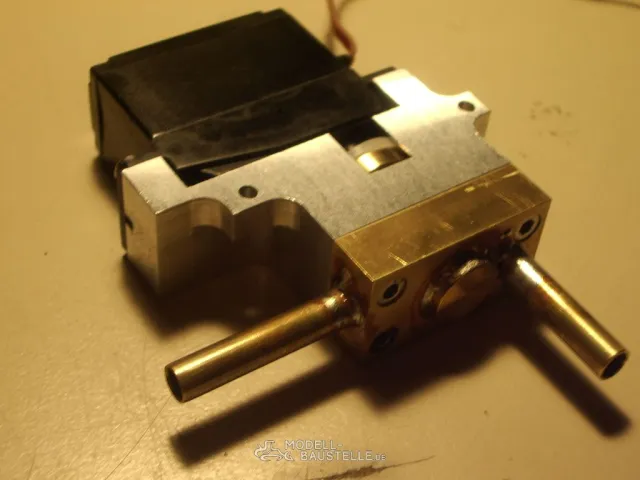
Heute habe ich das Ventil für den Drucklosen Umlauf fertig bekommen und eingebaut. Ist einfach eine
6er Silberstahlwelle mit 3mm Querbohrung. Diese verbindet im Gehäuse einfach nur P mit T oder auch
nicht. Abgedichtet ist die Welle mit einem Nutring. Die Gehäusedichtung ist ein O- Ring. Die Welle
ist mit 2 Kugellagern beidseitig gelagert, nicht unbedingt notwendig, sieht aber hoch technisch aus.
Hier ein paar Bilder: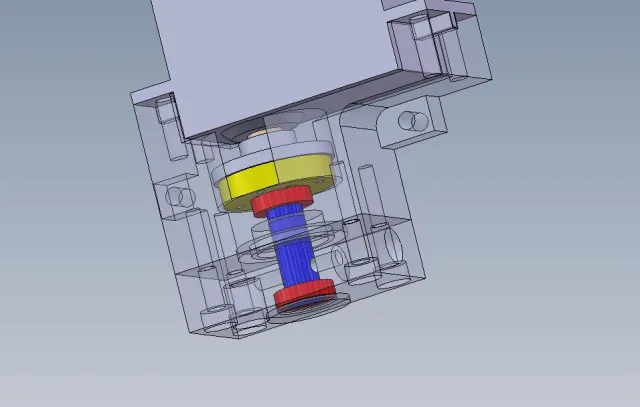




Angesteuert wird das Ventil von dem oben beschriebenen Mischer.
Gruß Andre
-
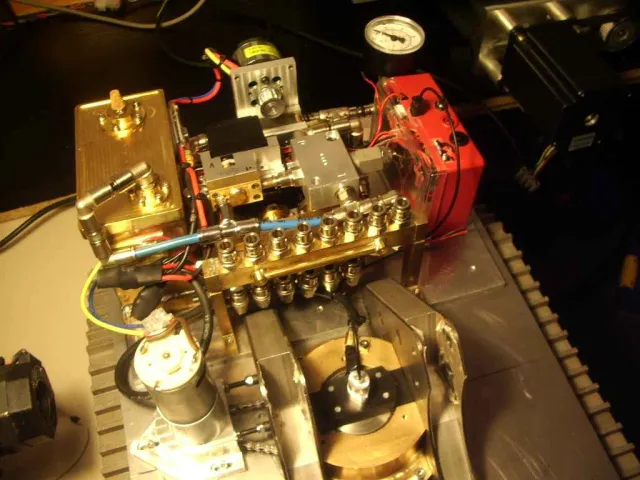
Hallo Gemeinde,
weiter gehts auf der elektronischer Seite. Da ich nur eine MC10 habe, stehen mir keine Mischer zur
Verfügung. Also musste ich selber ran. Die so entstandene Schaltung funktioniert so:Die Kanäle 1-3 und 6 werden in einen Mikrocontroller gemessen und verarbeitet. Es wird der Brushless- Regler
der Hydraulikpumpe und ein Servo für den Drucklosen Umlauf direkt angeschlossen. Die Impulserzeugung erfolgt
im Controller. Die Servos zu den Ventilen werden parallel zum Controller mit auf der Platine angeschlossen.Die Hydraulikpumpe wird über Kanal 6 rastend ein oder ausgeschaltet. Zusätzlich wird über Kanal 6 eine
Hupe tastend geschaltet.
Wenn die Pumpe ausgeschaltet ist, erzeugt der Controller Impulslängen, die einer Drehzahl von 0 upm entsprechen.
Wird die Pumpe eingeschaltet, läuft diese mit einer Leerlaufdehzahl, die über das Poti eingestellt werden kann.
Solange kein Hydraulikventil betätigt wird, ist das Ventil für den Drucklosen Umlauf offen (über Servo gesteuert). Sobald nur
eine Funktion betätigt wird, geht das Ventil zu. Die Hydraulik- Kanäle 1-3 werden jetzt gemessen, der höchste Wert wird ermittelt,
und direkt an den Pumpenregler weitergegeben.Der Empfänger ist einfach aufgesteckt, da ich den in verschiedenen Modellen einsetze. Der Controller (PIC16F870) ist mit seiner Aufgabe
eigentlich total unterfordert.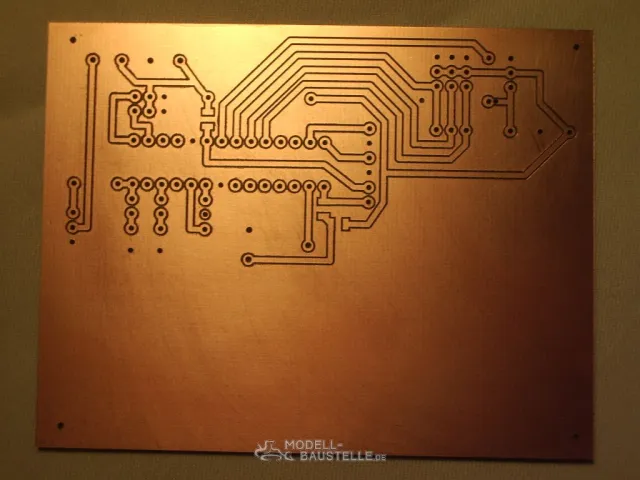

Grüße Andre
-
Hallo Ralf,
da Planeten: ~13,8
da Innenzahnkranz: 38
di Innenzahnkranz: ~31
da Sonnenräder: ~8Kugellager Kettenrad:58x45x7
Kugellager Getriebe Eingang: 42x30x7
Kugellager Getriebe Abgang: 32x20x7Alle Maße sind über die Zahnspitzen gemessen! Ich vermute die Zahnräder haben Modul 1, aber
genau weiß ich es nicht. Als Materialquelle habe ich 2 defekte Mittelklasse Akkuschrauber und 2 der
billigsten aus dem Baumarkt (Max Bahr - Marke Bonus) genommen. Ich brauchte 4 Schrauber, da
ich insgesamt 4 Planetenträger mit Sonnenrad brauchte, und pro Schrauber nur eins verbaut ist.Anscheinend sind in der unteren Preisklasse überall die selben Getriebe drin?!
Die Gesamtübersetzung beträgt ca 1:40
Gruß Andre
-



Gruß Andre