Hallo
Ich bin der Martin aus Österreich und möchte euch mein Projekt vorstellen.
Als kurze Vorgeschichte. Ich bau derzeit meinen ersten Bagger in Eigenbau. Ein CAT 390 F in 1:16.
Der Bagger wenn er fertig ist benötigt mindestens 8 Kanäle und da findet man auch schön günstige Sender,
Die meisten steuern ja die Ketten des Baggers mit zwei Schieber am Sender, doch wenn man einen Bagger richtig bewegen will wie im echten Leben ,dann benötigt man zwei Hände und zwei Füße.
Da ich glaube das Pedale für einen Sender schwer zu realisieren sind und auch Komisch ausschauen, habe ich mir gedacht ich nehme einen alten Doppelregler mit Mischfunktion von Servonaut um den Bagger mit einen Kreuzknüppel zu steuern.
Mit dieser Entscheidung begann die Suche nach einer Fernsteuerung die drei Kreuzknüppel hat. Leider kam dann die Ernüchterung, da alles was drei Knuppel hat 2000€ aufwärts kostet und die dazugehörigen Empfänger auch nicht billig sind.
Da ich mich aber nicht so schnell geschlagen geben wollte dachte ich mir, Ich bastle gerne also schauen wir mal ob ich mir sowas nicht selber bauen kann.
Ich kann euch nur sagen nach über 1,5 Jahren 3d Drucken Lösten und Programmieren habe ich es geschafft. Ein 16 Kanal Sender mit einen 16 Kanal Empfänger und ein 12 Kanal Empfänger für unter 200€.
Zu den Funktionen:
Hier sind die Sachen die man direkt auf dem Sender einstellen kann:
- Modelspeicher von 9 Modellen
- Mittelstellung aller 16 Kanäle
- Trimmen
- Revers
- Todzone
- Sender Akku Warnungs Spannung und Kritische Spannung
- Sender Akku Spannungs feinjustierung
- Empfänger Akku Warnungs Spannung und Kritische Spannung
- Empfänger Akku Spannungs feinjustierung
- Failsafe aller 16 Kanäle
Folgendes wurde Programmiert
- Spannungsüberwachung von Sender und Empfänger Akku
- eine Mischerfunktion die alle Hydraulikkanäle zusammenfügt um eine Drehzahlregeung der Hydraulikpumpe zu haben ( Derzeit nur für den ersten Modelspeicher)
- Pumpen Modus Manuell/Aus/Automatisch. Manuell: Fixe Drehzahl über Drehpotentiometer Aus: ist aus. Automatisch: Mischer ist aktiv, Grunddrehzahl wird über das Poti geregelt und wenn keine Hydraulikfunktion benötigt wird dreht sich die Pumpe nach 4 Sekunden ab. Gesteuert wird dies durch einen Kippschalter
- 12 Analoge Kanäle mit 1024 Bit und 4 Digitale Kanäle die über 256 Bit eingestellt werden können (Mittelstellung/Trimm/Reverse)
- Bei den Empfängern wird das Model über einen Microtaster ausgewählt und mittels LED angezeigt
Komponenten:
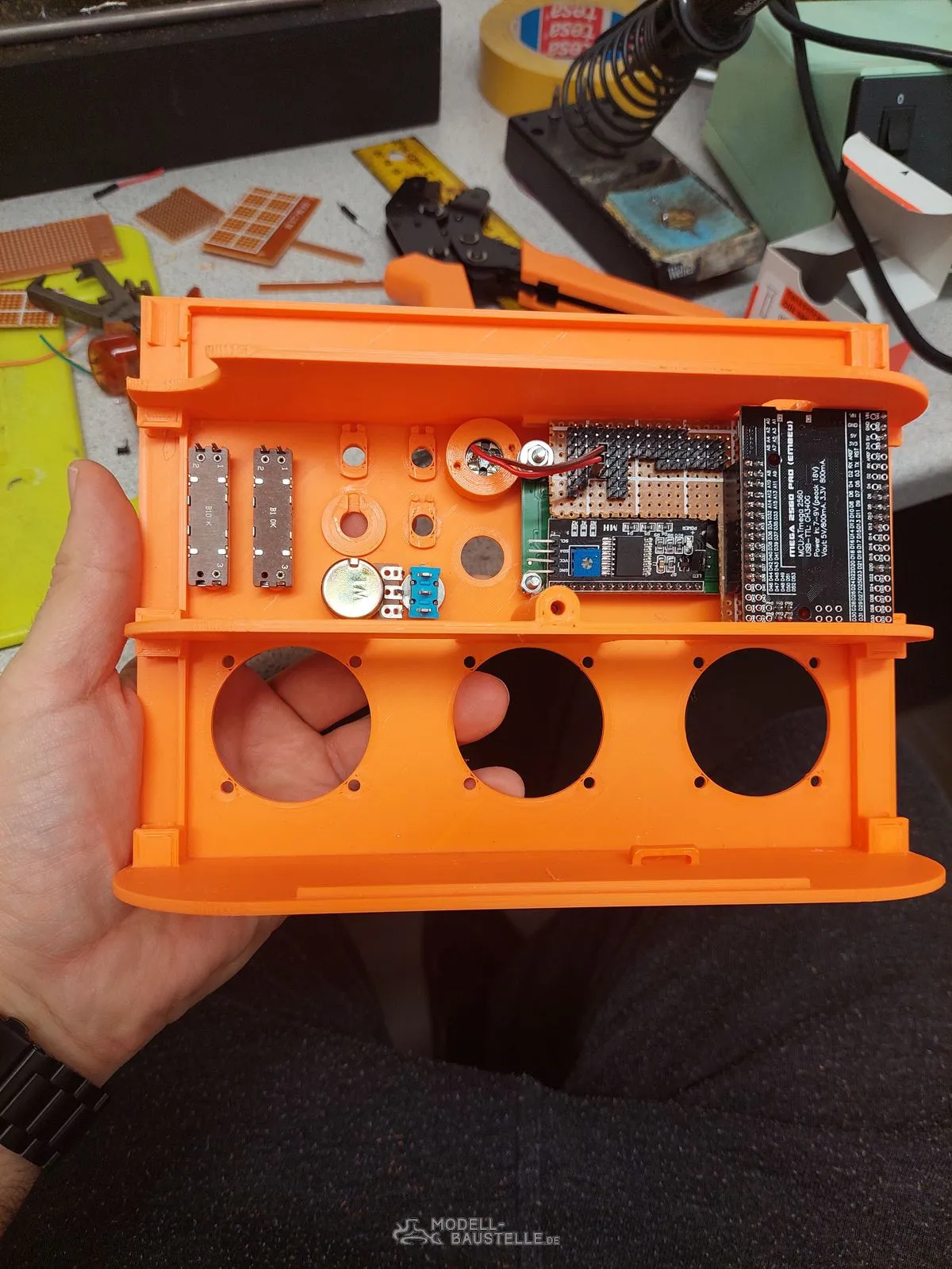
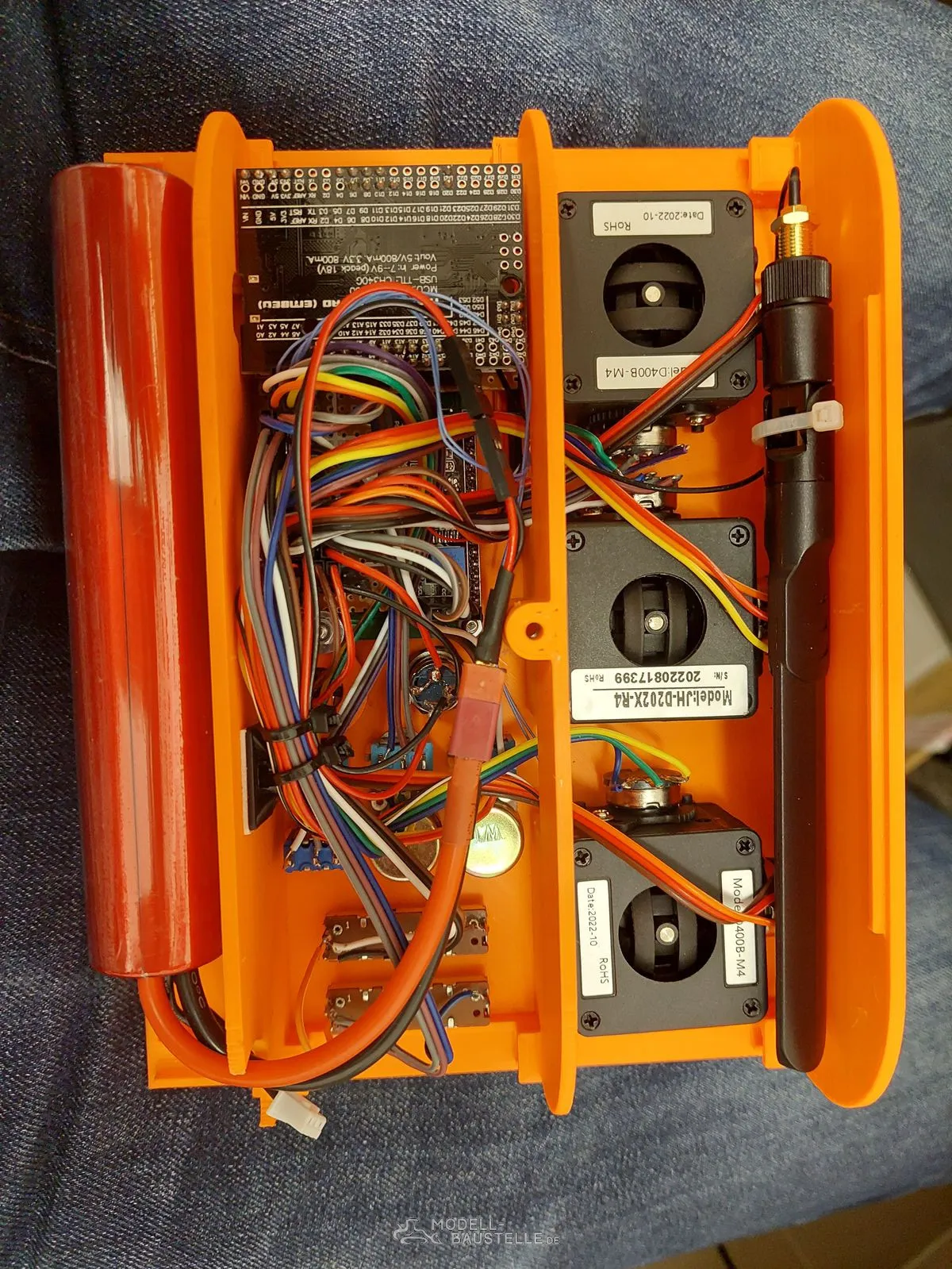
Sender:
- Gehäuse 3D Druck aus PLA
- 2x 4D Kreuzknüppel 10k
- 1x 2D Kreuzknüppel 10k
- 2x 10K Drehpoti
- 2x 10k Schiebepoti
- 3x Kippschalter
- 1x Kipptaster
- Einschaltknopf mit LED
- 1x 16x2 Display
- 3x Microtaster
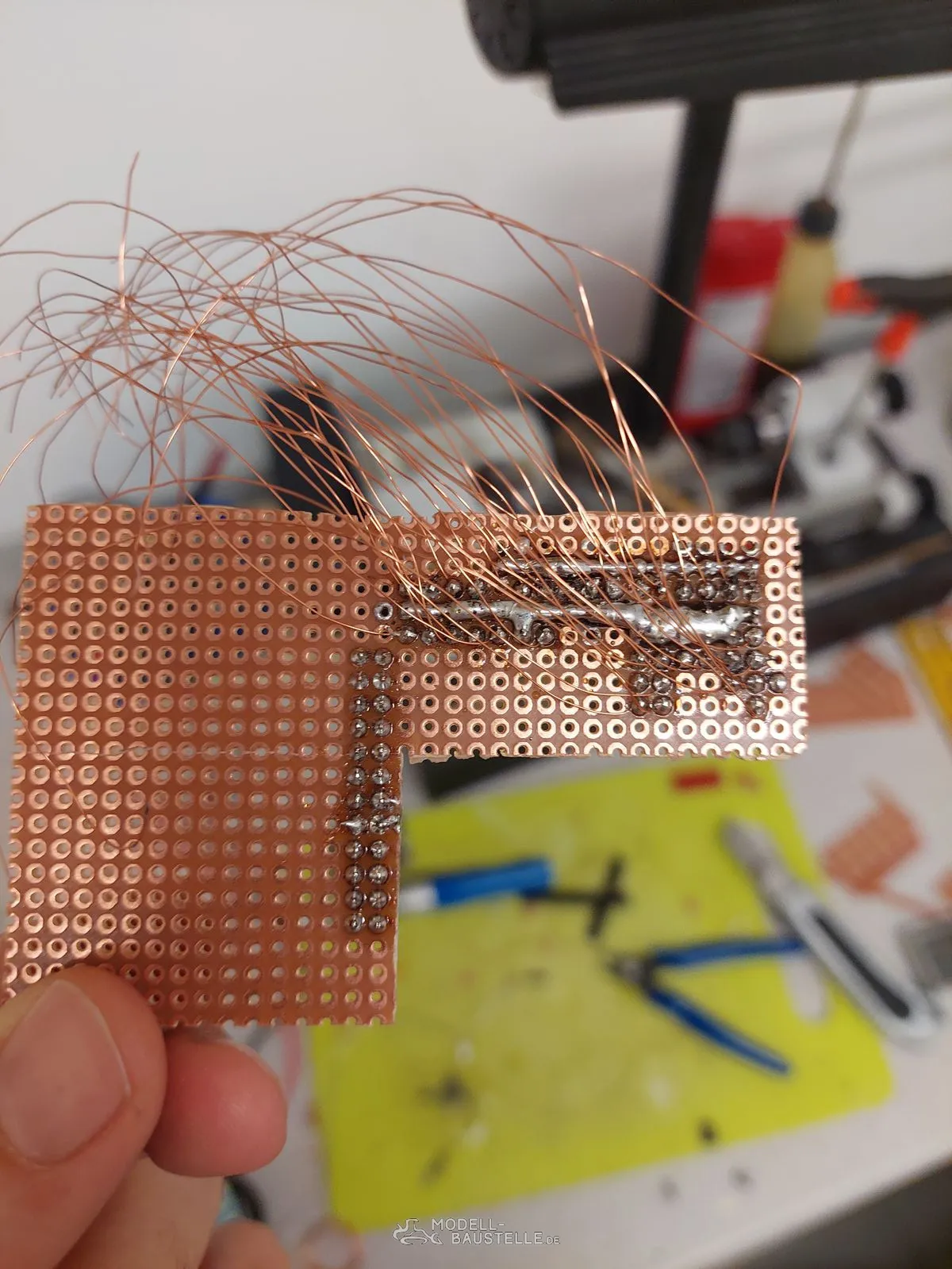
- Lochrasterplatten
- Stiftleisten
- Lackdraht
- Arduino Mega Pro mini
- NRF24l01 LNA+PA mit Externer Antenne
- Isolierband und Alufolie für die Schirmung des RF Modul
- 1x 10k Wiederstand
- 1x 100k Wiederstand
Empfänger 16 Kanal:
- Gehäuse 3D Druck aus PLA
- Stiftleisten
- Lochrasterplatte
- 1x 10k Wiederstand
- 1x 100k Wiederstand
- 1x 220 Wiederstand
- 1x rote LED
- Arduino Mega Pro mini
- NRF24l01 SMD
- Lackdraht
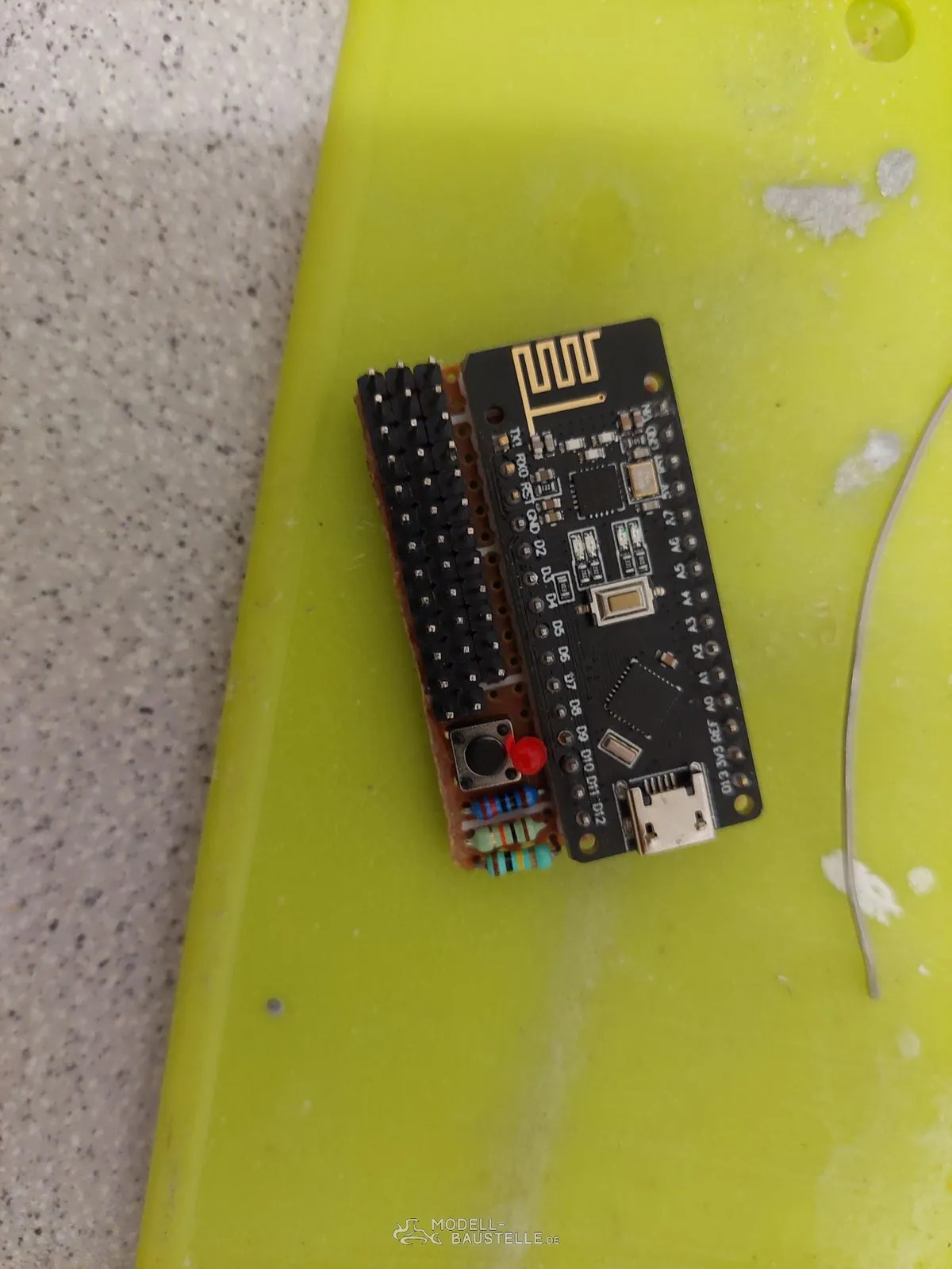
Empfänger 12 Kanal:
- Gehäuse 3D Druck aus PLA
- Stiftleisten
- Lochrasterplatte
- 1x 10k Wiederstand
- 1x 100k Wiederstand
- 1x 220 Wiederstand
- 1x rote LED
- RFNano (Arduino Nanu mit fest verbautem NRF24l01 Modul)
- Lackdraht
Ich glaube das ich euch mal Grob alle Daten zusammengeschrieben habe.
Falls es jemanden Interessiert. Der Code für den Sender hat 12000 Zeilen und der für die Empfänger 500.
Bei diesen Projekt habe ich sehr viel dazu gelernt und zumindest bei der Verkabelung würde ich einiges nun anders machen,
Würde mich sehr freuen auch von euch was zu hören.
Hier noch ein paar Fotos aus der Entstehung des ganzen: