Guten Abend,
seit nun einem Jahr beschäftige ich mich mit der Planung des Dumpers CAT 740B im Maßstab 1:14,5. Dabei ist mir die Funktionalität zu angemessenem Preis wichtig, sodass ich mich entschloss, auf Hydraulik zu verzichten. Nun mag man sagen, dass dieses Modell ohne Hydraulik kein richtiger Nachbau ist, jedoch lässt mein Geldbeute dies nicht zu und ich habe kein Problem damit. Was meinen Erfahrungsschatz angeht, sehe ich mich zwischen einem Anfänger und Fortgeschrittenen. Seit mehreren Jahren beschäftige ich mich mit Funktionsmodellbau (nicht fergesteuert) und seit nun einem Jahr auch mit ferngesteuerten Modellen. Mein Wissen ergänze ich durch Literatur und Forumsberichte, wie hier. Trotzdem bin ich über jede Antwort oder Kritik sehr dankbar, da ich diese als Chance ansehe.
Nun zum Modell:
Natürlich soll es ein Allradfahrzeug werden. Dies werde ich so umsetzen, dass jedes Rad von einem Servonaut RB35Power80 Getriebemotor angetrieben wird und alle sechs Motoren mit Hilfe des Servonaut S20 gesteuert werden. Mit Servonaut habe ich einfach nur gute Erfahrungen gemacht. Bei den Reifen dachte ich an Hohlkammerreifen des Typs Michelin 14 R 20 XL von BaMaTech, bin aber auch am Überlegen ob Vollgummireifen besser wären. Da es bei weicheren Reifen normalerweise zu einer Erhöhung des Rollwiderstandes und damit zum größeren Stromverbrauch kommt, habe ich mich noch nicht endgültig entschlossen. Was meint Ihr als Experten dazu? Die Felgen (Artnr. 203751) sowie Radnaben werde ich auch von dieser Firma beziehen.
Bezüglich der Knicklenkung dachte ich an ein sehr starkes Servo, bin aber noch auf der Suche nach dem Optimum. Hat jemand von euch ein ähnliches Modell gebaut und kann mir einen Tipp geben? Falls ich leider diesen Bericht dazu übersehen haben soll, so seid mir nicht böse. Als Akku dachte ich an einen 12V Akku von Conrad Electonics (Bestnr. 209314 - VQ) mit 4000mAh, was eine vorraussichtliche Fahrzeit von 20 Minuten ergäbe.
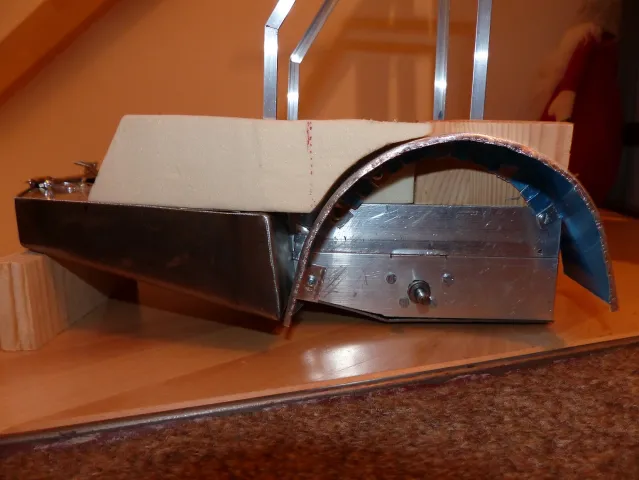
Was das Abkippen der Mulde angeht, habe ich mir nur ein paar Gedanken gemacht. In Frage kommt einerseits ein Spindelantrieb, andererseits eine Kippmechanik, wie man sie bei pawa-Modellbau findet. eine endgültige Entscheidung ist auch hier noch nicht gefallen.
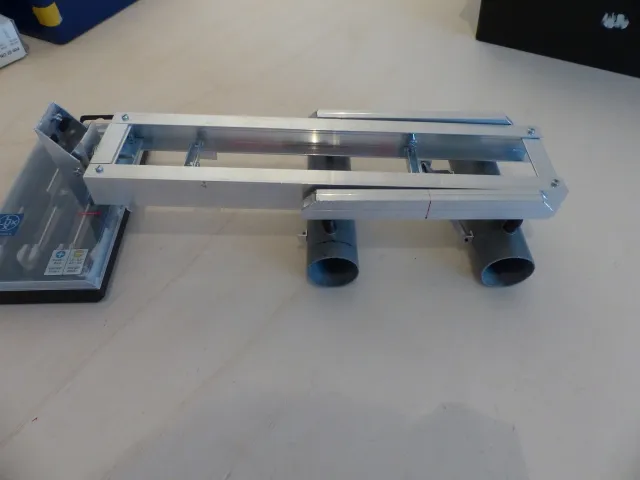
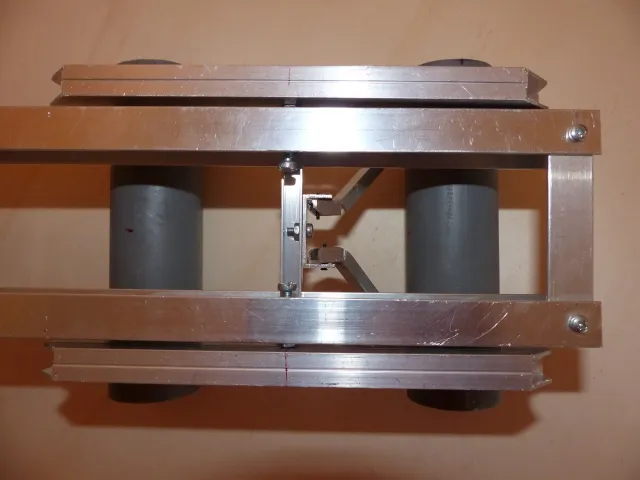
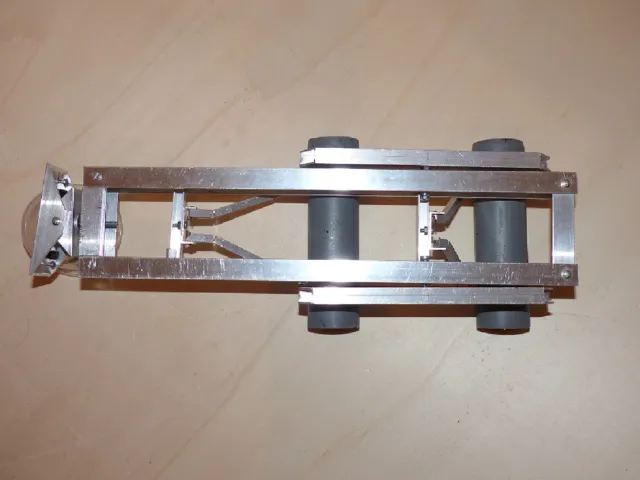
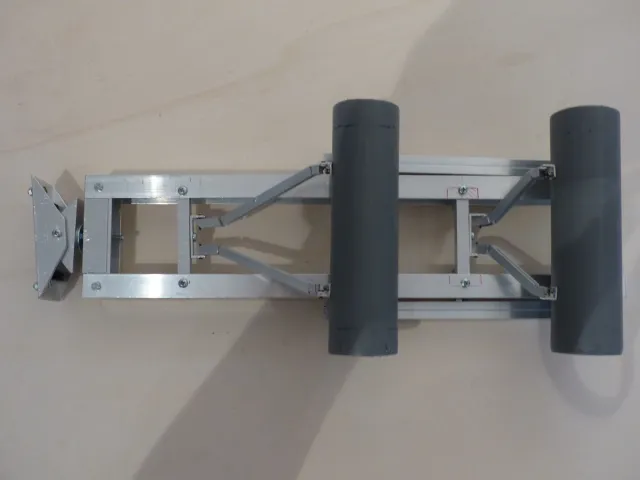
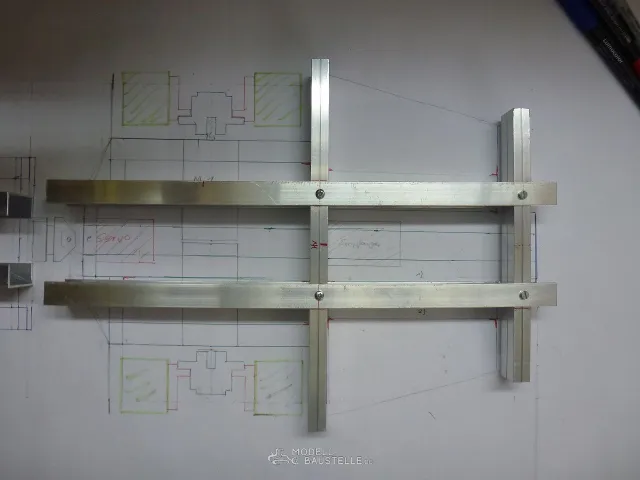
Den Rahmen werde ich aus verschiedenen Aluminiumprofilen aufbauen, hingegen die Aufbauten (ausgenommen die Mulde) aus Polystyrol sein sollen.
So, nun habt Ihr hoffentlich eine Vorstellung, wie mein aktuelles Projekt aussieht. Ich bitte euch um einen ehrliche Einschätzung und Kritik, da ich so Fehler bei der Planung oder dem Bau verhindern und beheben kann.
Vielen Dank im Voraus ![]()


 Außerdem sind sie in der gewünschten Größe mit dem Orginalprofil zu erhalten
Außerdem sind sie in der gewünschten Größe mit dem Orginalprofil zu erhalten




 welches schnell behoben werden konnte: die Motorwelle stand auf der Rückseite des Motors fast 1 cm heraus, sodass diese gekürzt werden musste. Nun passen beide Motoren perfekt und die Wellen liegen alle auf einer Geraden.
welches schnell behoben werden konnte: die Motorwelle stand auf der Rückseite des Motors fast 1 cm heraus, sodass diese gekürzt werden musste. Nun passen beide Motoren perfekt und die Wellen liegen alle auf einer Geraden.

 Das Material kann in verschiedenen Dichten und Größen bestellt werden und lässt sich hervorragend bearbeiten. Schnitzen, Schleifen, Fräsen, Spachtel, Lackieren, ... alles ist möglich. Außerdem ist es sehr hitzebeständig, bei geringen Gewicht sehr stabil und brennt nicht
Das Material kann in verschiedenen Dichten und Größen bestellt werden und lässt sich hervorragend bearbeiten. Schnitzen, Schleifen, Fräsen, Spachtel, Lackieren, ... alles ist möglich. Außerdem ist es sehr hitzebeständig, bei geringen Gewicht sehr stabil und brennt nicht